Difference between revisions of "Irfan Rahadi Kurninato"
| Line 67: | Line 67: | ||
print (hasil) | print (hasil) | ||
| − | + | '''[UTS 23 oktober]''' | |
'''3 A''' | '''3 A''' | ||
'''# Cara 1''' | '''# Cara 1''' | ||
| Line 175: | Line 175: | ||
print("Waktu untuk mencapai Vakhir: ",t, "detik") | print("Waktu untuk mencapai Vakhir: ",t, "detik") | ||
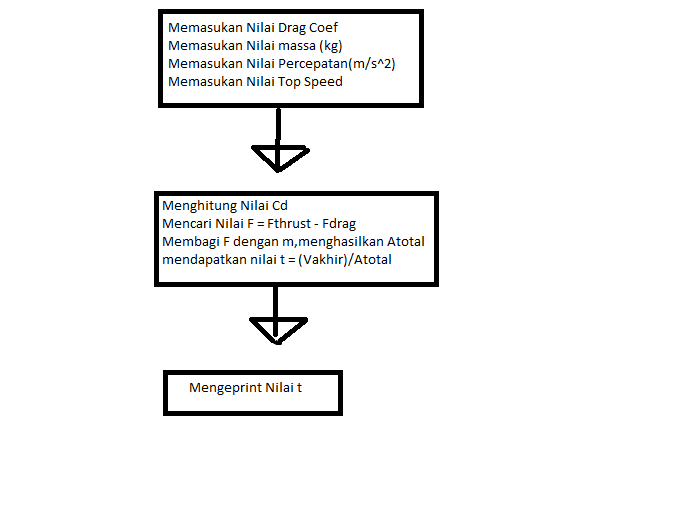
[[File:uts_cara3_irfan.png]] | [[File:uts_cara3_irfan.png]] | ||
| + | [[File:Algoritma_irfanuts.png]] | ||
Revision as of 00:13, 29 October 2019
السلام عليكم Irfan Rahadi Kurnianto - 1706036255
[4 September 2019] Mengapa kita harus belajar kalkulus? kalkulus adalah mata kuliah dasar teknik. Mata kuliah kalkulus sangat berguna untuk membentuk logika agar mudah dalam belajar suatu hal lain
Tugas 1

[11 September 2019] Bit Komputer Program Catur
coding bukan pelajaran anak fasilkom/elektro belajar python praktek programing dasar2 programing + pyhton programnya irfan t2 dikelas

[18 September 2019]
Tugas irfan 18 sep 19
[25 September 2019]
Tugas irfan 25 sep 19 catatan irfan 25 sep 19
[Kuis 16 Oktober 2019] program runge kutta
https://pastebin.com/GxfenTa3 # dibuat oleh irfan rahadi 1706036255 def TurunanY(x, y): #Fungsi Turunan Y return ((x**2 - 4*y)) xawal = 0 #boundary condition x awal soal yinit = 1 #boundary condition y awal soal x = 0.03 #nilai x yang ditanya h = 0.01 #delta yang digunakan angka = (int)((x - xawal)/h) #menghitung jumlah increment yg diperlukan for i in range(1, angka + 1): k1 = h * TurunanY(xawal, yinit) #rumus runge kutta k2 = h * TurunanY(xawal + 0.5 * h, yinit + 0.5 * k1) k3 = h * TurunanY(xawal + 0.5 * h, yinit + 0.5 * k2) k4 = h * TurunanY(xawal + h, yinit + k3) yinit = yinit + (1.0 / 6.0)*(k1 + 2 * k2 + 2 * k3 + k4) #menjumlahkan nilai k1,k2,k3,k4 ke y' yang baru dan membaginya xawal = xawal + h #menambahkan xawal besarkan delta h print(yinit)
PROGRAM GAUSS
from numpy import linalg
import numpy as np
a= np.array ([[0,0,2,1,2] ,[0,1,0,2,-1], [1,2,0,-2,1], [0,0,0,-1,1], [0,1,-1,1,-1]])
b= np.array ([[1], [1], [-4], [-2], [-1]])
c= np.array ([[0,0,2,1,2,1] ,[0,1,0,2,-1,1], [1,2,0,-2,1,-4], [0,0,0,-1,1,-2], [0,1,-1,1,-1,-1]])
print ("Matrix a " , a)
print ("Matrix b ", b)
print ("Matrixnya adalah:" , c)
matsolve = linalg.solve (a,c)
x1 = int(matsolve[0])
x2 = int(matsolve[1])
x3 = int(matsolve[2])
x4 = int(matsolve[3])
x5 = int(matsolve[4])
hasil= (x1, x2, x3, x4, x5)
print ("Hasil nilai x1,x2,x3,x4,x5 :")
print (hasil)
[UTS 23 oktober]
3 A
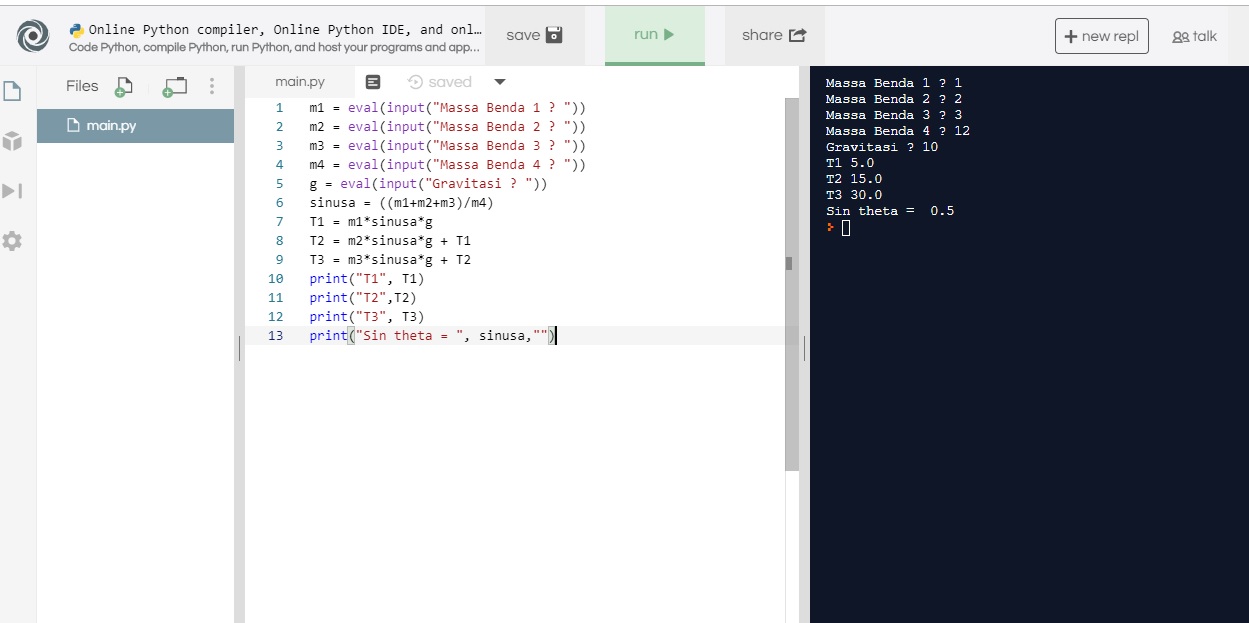
# Cara 1
m1 = eval(input("Massa Benda 1 ? "))
m2 = eval(input("Massa Benda 2 ? "))
m3 = eval(input("Massa Benda 3 ? "))
m4 = eval(input("Massa Benda 4 ? "))
g = eval(input("Gravitasi ? "))
sinusa = ((m1+m2+m3)/m4)
T1 = m1*sinusa*g
T2 = m2*sinusa*g + T1
T3 = m3*sinusa*g + T2
print("T1", T1)
print("T2",T2)
print("T3", T3)
print("Sin theta = ", sinusa,"")
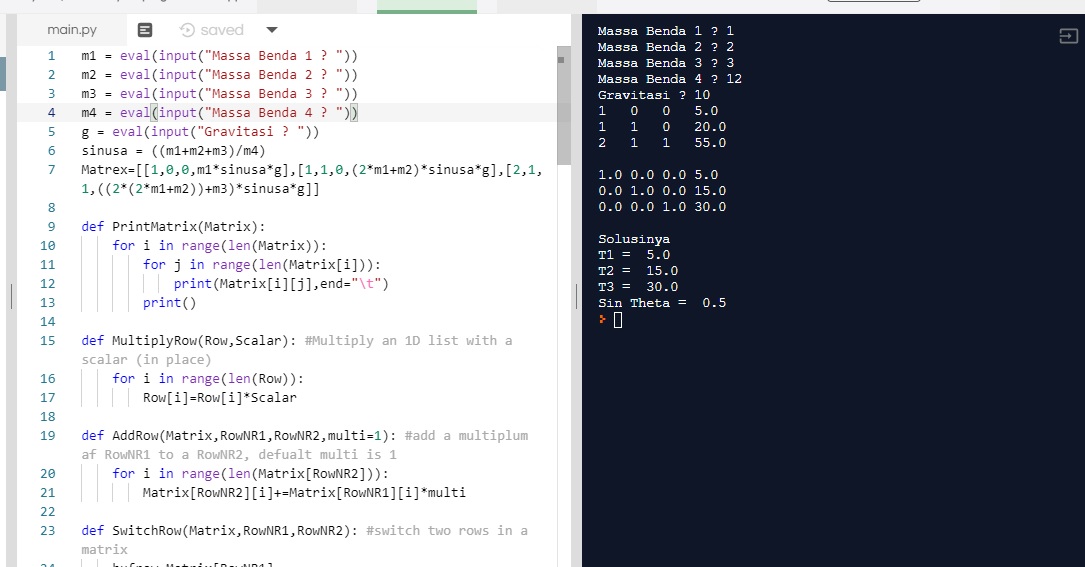
 #Cara 2
m1 = eval(input("Massa Benda 1 ? "))
m2 = eval(input("Massa Benda 2 ? "))
m3 = eval(input("Massa Benda 3 ? "))
m4 = eval(input("Massa Benda 4 ? "))
g = eval(input("Gravitasi ? "))
sinusa = ((m1+m2+m3)/m4)
Matrex=[[1,0,0,m1*sinusa*g],[1,1,0,(2*m1+m2)*sinusa*g],[2,1,1,((2*(2*m1+m2))+m3)*sinusa*g]] #Matrix yg mau di gauss
def PrintMatrix(Matrix): #untuk print
for i in range(len(Matrix)):
for j in range(len(Matrix[i])):
print(Matrix[i][j],end="\t")
print()
def MultiplyRow(Row,Scalar): #untuk kali
for i in range(len(Row)):
Row[i]=Row[i]*Scalar
def AddRow(Matrix,RowNR1,RowNR2,multi=1): #untuk tambah
for i in range(len(Matrix[RowNR2])):
Matrix[RowNR2][i]+=Matrix[RowNR1][i]*multi
def SwitchRow(Matrix,RowNR1,RowNR2): #untuk tukar
bufrow=Matrix[RowNR1]
Matrix[RowNR1]=Matrix[RowNR2]
Matrix[RowNR2]=bufrow
return 0
def ZeroRowsBelow(Matrix,RowNR,CollumnNR): #untuk menghindari eror 0
for i in range(len(Matrix)-RowNR-1):
if not(Matrix[RowNR][CollumnNR]==0):
AddRow(Matrix,RowNR,i+1+RowNR,-float(Matrix[i+1+RowNR][CollumnNR])/Matrix[RowNR][CollumnNR])
#print(i)
def SolveMatrix(Matrix): #untuk mensolve
#Bring To Row-Echelon Form
for i in range(len(Matrex)):
ZeroRowsBelow(Matrex,i,i)
#Make Row-Echelon 1
for i in range(len(Matrex)):
if not(Matrex[i][i]==0):
MultiplyRow(Matrex[i],1./Matrex[i][i])
#diulang lagi
for i in range(len(Matrex)):
for j in range(i):
if not(Matrex[i][i]==0):
AddRow(Matrex,i,j,-float(Matrex[j][i])/Matrex[i][i])
def IsRRowEchelon(Matrix): #cek selsai
for i in range(len(Matrix)):
pos=[1,0]
if not(Matrix[i][i] in pos):
return 0
return 1
def CheckForEqualRows(Matrix):#cek nilai
newlist=[]
for i in Matrix:
if i not in newlist:
newlist.append(i)
return newlist
MatrixNew=[]
for j in range(len(Matrex)):
RowNew=[]
for i in range(len(Matrex[j])):
RowNew.append(Matrex[j][i])
MatrixNew.append(RowNew)
Matrex=MatrixNew
PrintMatrix(Matrex)
print()
while True:
SolveMatrix(Matrex)
Matrex=CheckForEqualRows(Matrex)
if IsRRowEchelon(Matrex):
break
PrintMatrix(Matrex)#print matrix
print("")
print("Solusinya")
print("T1 = ",Matrex[0][3])
print("T2 = ",Matrex[1][3])
print("T3 = ",Matrex[2][3])
print("Sin Theta = ",Matrex[0][3]/(m1*g))
#Cara 2
m1 = eval(input("Massa Benda 1 ? "))
m2 = eval(input("Massa Benda 2 ? "))
m3 = eval(input("Massa Benda 3 ? "))
m4 = eval(input("Massa Benda 4 ? "))
g = eval(input("Gravitasi ? "))
sinusa = ((m1+m2+m3)/m4)
Matrex=[[1,0,0,m1*sinusa*g],[1,1,0,(2*m1+m2)*sinusa*g],[2,1,1,((2*(2*m1+m2))+m3)*sinusa*g]] #Matrix yg mau di gauss
def PrintMatrix(Matrix): #untuk print
for i in range(len(Matrix)):
for j in range(len(Matrix[i])):
print(Matrix[i][j],end="\t")
print()
def MultiplyRow(Row,Scalar): #untuk kali
for i in range(len(Row)):
Row[i]=Row[i]*Scalar
def AddRow(Matrix,RowNR1,RowNR2,multi=1): #untuk tambah
for i in range(len(Matrix[RowNR2])):
Matrix[RowNR2][i]+=Matrix[RowNR1][i]*multi
def SwitchRow(Matrix,RowNR1,RowNR2): #untuk tukar
bufrow=Matrix[RowNR1]
Matrix[RowNR1]=Matrix[RowNR2]
Matrix[RowNR2]=bufrow
return 0
def ZeroRowsBelow(Matrix,RowNR,CollumnNR): #untuk menghindari eror 0
for i in range(len(Matrix)-RowNR-1):
if not(Matrix[RowNR][CollumnNR]==0):
AddRow(Matrix,RowNR,i+1+RowNR,-float(Matrix[i+1+RowNR][CollumnNR])/Matrix[RowNR][CollumnNR])
#print(i)
def SolveMatrix(Matrix): #untuk mensolve
#Bring To Row-Echelon Form
for i in range(len(Matrex)):
ZeroRowsBelow(Matrex,i,i)
#Make Row-Echelon 1
for i in range(len(Matrex)):
if not(Matrex[i][i]==0):
MultiplyRow(Matrex[i],1./Matrex[i][i])
#diulang lagi
for i in range(len(Matrex)):
for j in range(i):
if not(Matrex[i][i]==0):
AddRow(Matrex,i,j,-float(Matrex[j][i])/Matrex[i][i])
def IsRRowEchelon(Matrix): #cek selsai
for i in range(len(Matrix)):
pos=[1,0]
if not(Matrix[i][i] in pos):
return 0
return 1
def CheckForEqualRows(Matrix):#cek nilai
newlist=[]
for i in Matrix:
if i not in newlist:
newlist.append(i)
return newlist
MatrixNew=[]
for j in range(len(Matrex)):
RowNew=[]
for i in range(len(Matrex[j])):
RowNew.append(Matrex[j][i])
MatrixNew.append(RowNew)
Matrex=MatrixNew
PrintMatrix(Matrex)
print()
while True:
SolveMatrix(Matrex)
Matrex=CheckForEqualRows(Matrex)
if IsRRowEchelon(Matrex):
break
PrintMatrix(Matrex)#print matrix
print("")
print("Solusinya")
print("T1 = ",Matrex[0][3])
print("T2 = ",Matrex[1][3])
print("T3 = ",Matrex[2][3])
print("Sin Theta = ",Matrex[0][3]/(m1*g))



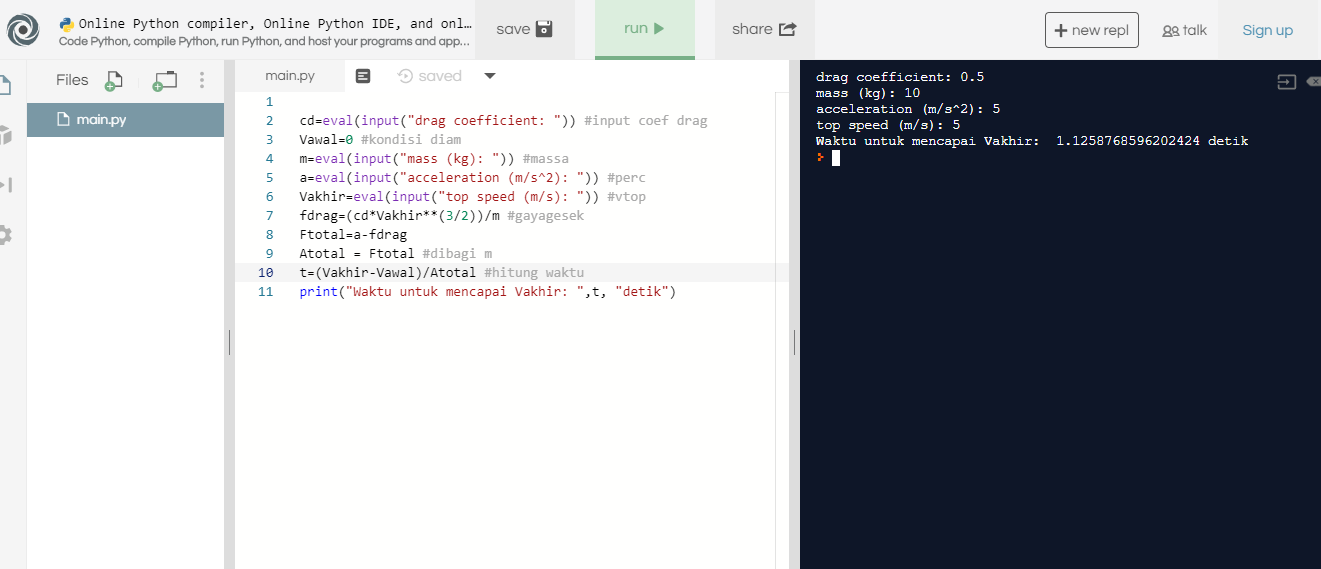
3 B
cd=eval(input("drag coefficient: ")) #input coef drag
Vawal=0 #kondisi diam
m=eval(input("mass (kg): ")) #massa
a=eval(input("acceleration (m/s^2): ")) #perc
Vakhir=eval(input("top speed (m/s): ")) #vtop
fdrag=(cd*Vakhir**(3/2))/m #gayagesek
Ftotal=a-fdrag
Atotal = Ftotal #dibagi m
t=(Vakhir-Vawal)/Atotal #hitung waktu
print("Waktu untuk mencapai Vakhir: ",t, "detik")