Faizal Rikaz Al Muntaqo
Selamat Datang di laman Wiki saya!
Biodata

Nama : Faizal Rikaz Al Muntaqo
NPM : 1806201245
TTL : Jakarta, 15 Desember 1999
Hobi : Futsal
Saya adalah seorang mahasiswa Teknik Mesin UI angkatan 2018. Ketertarikan saya kepada Jurusan Teknik Mesin salah satunya didasari oleh rasa penasaran dan kesukaan saya terhadap teknologi yang terus berkembang tiap harinya dan dan juga tidak sedikit saya mendapatkan pengaruh secara tidak langsung dari ayah saya yang juga merupakan seorang Engineer. Saya sangat berharap nantinya ilmu ilmu yang telah saya dapatkan dari perkuliahan dapat diaplikasikan dikehidupan saya kedepannya dan semoga dapat berguna bagi keluarga, agama dan bangsa Indonesia.
Contents
Metode Numerik
Tujuan Pembelajaran
Tujuan pembelajaran dari mata kuliah Metode Numerik ini adalah:
- 1.Memahami konsep dan prinsip dasar dalam metode numerik (contoh:Persamaan aljabar, algorithma, dll)
- 2. Mengerti dan dapat mengaplikasikan aplikasi metode numerik
- 3. Mampu menerapkan ilmu-ilmu metode numerik dalam persoalan teknik
- 4. Mendapat nilai tambah adab sehingga dapat menjadi orang yang lebih beradab
Review Materi(Sebelum UTS)
Beberapa topik yang dibahas pada saat sebelum UTS meliputi:
- 1. Deret Taylor dan McLaurin
- 2. Regresi Linear
- 3. Interpolasi
- 4. Pseudocode
Pertemuan 1 (11/11/20)
Tugas Pertemuan 1 adalah mempelajari Modelica melalui situs Youtube lalu membuat video pembelajaran tentang Modelica kemudian di-upload di channel Youtube. Saya mempelajari Modelica melalui youtube pada situs berikut:
https://www.youtube.com/watch?v=m0Ahs8fEN28
Dan berikut merupakan Tugas video pembelajaran saya pada aplikasi modelica.
Pertemuan 2 (18/11/20)
Pada pertemuan kali ini kami sharing tugas yang telah diberikan diminggu lalu. Perbedaan Modelica dan Bahasa Coding lainnya (seperti: Phyton, dll) adalah modelica merupakan bahasa permodelan dan berbeda dengan bahasa coding sperti phyton dll. Pada proses simulate Open Modellica cukup lama karena proses dari bahasa modelica ke C lalu baru ke bahasa mesin. Namun ketika kita hanya merubah parameternya saja dengan cara me-resimulate maka proses akan cepat, karena tidak melewati proses perubahan bahasa lagi.
Mengapa menggunakan open modelica?
- - Cocok dengan engineer
- - Sistem perhitungan cepat
- - Banyak penggunanya
- - Free/ open technology
Tugas Video: https://www.youtube.com/watch?v=nVaCw_QBNaY
Pertemuan 3 (25/11/20)
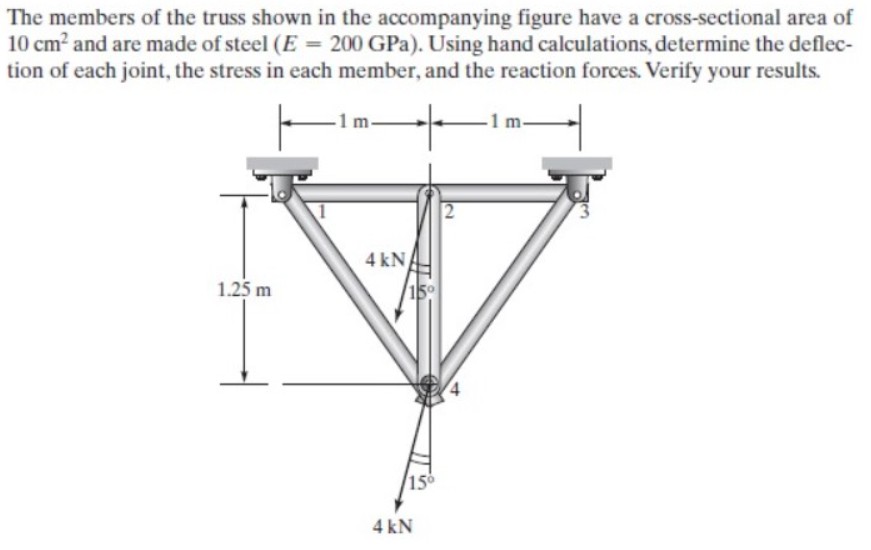
Pada pertemuan ke 3 ini mempelajari tentang pseoudocode gauss elemination, lalu Pseudocode gauss dijelaskan oleh teman sekelas kami yaitu Christo. Lalu kami juga ditugaskan untuk membuat program sederhana menggunakan Open Modelica untuk menyelesaikan sebuah permasalahan yaitu mengenai Truss. Berikut Tugas Truss yang telah saya kerjakan.
TUGAS TRUSSES
 class Tugas_Trusses
parameter Integer N=8; //Global Matrice
parameter Real A=0.001; //Area m2
parameter Real E=200e9; //Pa
Real KG[N,N]; //global
Real KGinitial[N,N]; //global
Real Sol[N]; //global dispplacement
Real X[N]={0,0,-1035.2762,-3863.7033,0,0,-1035.2762,-3863.7033};
Real R[N];
Real SolMat[N,1];
Real XMat[N,1];
Real L1=1;
Real L2=1;
Real L3=1.6;
Real L4=1.25;
Real L5=1.6;
Real Tetha1=degtorad(0);
Real Tetha2=degtorad(0);
Real Tetha3=degtorad(231.34);
Real Tetha4=degtorad(270);
Real Tetha5=degtorad(308.66);
//Boundary condition
Integer b1=1;
Integer b2=3;
//Truss 1
Real X1=Tetha1;
Real k1=A*E/L1;
Real K1[4,4]; //stiffness matrice
Real KG1[N,N];
Integer p1o=1;
Integer p1i=2;
//Truss 2
Real X2=Tetha2;
Real k2=A*E/L2;
Real K2[4,4]; //stiffness matrice
Real KG2[N,N];
Integer p2o=2;
Integer p2i=3;
//Truss 3
Real X3=Tetha1;
Real k3=A*E/L3;
Real K3[4,4]; //stiffness matrice
Real KG3[N,N];
Integer p3o=2;
Integer p3i=4;
//Truss 4
Real X4=Tetha4;
Real k4=A*E/L4;
Real K4[4,4]; //stiffness matrice
Real KG4[N,N];
Integer p4o=1;
Integer p4i=4;
//Truss 5
Real X5=Tetha5;
Real k5=A*E/L5;
Real K5[4,4]; //stiffness matrice
Real KG5[N,N];
Integer p5o=3;
Integer p5i=4;
algorithm
//Pembuatan Matrice Global
K1:=Stiffness_Matrices(X1);
KG1:=k1*Local_Global(K1,N,p1o,p1i);
K2:=Stiffness_Matrices(X2);
KG2:=k2*Local_Global(K2,N,p2o,p2i);
K3:=Stiffness_Matrices(X3);
KG3:=k3*Local_Global(K3,N,p3o,p3i);
K4:=Stiffness_Matrices(X4);
KG4:=k4*Local_Global(K4,N,p4o,p4i);
K5:=Stiffness_Matrices(X5);
KG5:=k5*Local_Global(K5,N,p5o,p5i);
KG:=KG1+KG2+KG3+KG4+KG5;
KGinitial:=KG;
//Implementing Boundary Condition
for i in 1:N loop
KG[2*b1-1,i]:=0;
KG[2*b1,i]:=0;
KG[2*b2-1,i]:=0;
KG[2*b2,i]:=0;
end for;
KG[2*b1-1,2*b1-1]:=1;
KG[2*b1,2*b1]:=1;
KG[2*b2-1,2*b2-1]:=1;
KG[2*b2,2*b2]:=1;
//Solving Displacement
Sol:=Gauss_Jordan(N,KG,X);
//Solving Reaction Force
SolMat:=matrix(Sol);
XMat:=matrix(X);
R:=Reaction_Trusses(N,KGinitial,SolMat,XMat);
end Tugas_Trusses;
class Tugas_Trusses
parameter Integer N=8; //Global Matrice
parameter Real A=0.001; //Area m2
parameter Real E=200e9; //Pa
Real KG[N,N]; //global
Real KGinitial[N,N]; //global
Real Sol[N]; //global dispplacement
Real X[N]={0,0,-1035.2762,-3863.7033,0,0,-1035.2762,-3863.7033};
Real R[N];
Real SolMat[N,1];
Real XMat[N,1];
Real L1=1;
Real L2=1;
Real L3=1.6;
Real L4=1.25;
Real L5=1.6;
Real Tetha1=degtorad(0);
Real Tetha2=degtorad(0);
Real Tetha3=degtorad(231.34);
Real Tetha4=degtorad(270);
Real Tetha5=degtorad(308.66);
//Boundary condition
Integer b1=1;
Integer b2=3;
//Truss 1
Real X1=Tetha1;
Real k1=A*E/L1;
Real K1[4,4]; //stiffness matrice
Real KG1[N,N];
Integer p1o=1;
Integer p1i=2;
//Truss 2
Real X2=Tetha2;
Real k2=A*E/L2;
Real K2[4,4]; //stiffness matrice
Real KG2[N,N];
Integer p2o=2;
Integer p2i=3;
//Truss 3
Real X3=Tetha1;
Real k3=A*E/L3;
Real K3[4,4]; //stiffness matrice
Real KG3[N,N];
Integer p3o=2;
Integer p3i=4;
//Truss 4
Real X4=Tetha4;
Real k4=A*E/L4;
Real K4[4,4]; //stiffness matrice
Real KG4[N,N];
Integer p4o=1;
Integer p4i=4;
//Truss 5
Real X5=Tetha5;
Real k5=A*E/L5;
Real K5[4,4]; //stiffness matrice
Real KG5[N,N];
Integer p5o=3;
Integer p5i=4;
algorithm
//Pembuatan Matrice Global
K1:=Stiffness_Matrices(X1);
KG1:=k1*Local_Global(K1,N,p1o,p1i);
K2:=Stiffness_Matrices(X2);
KG2:=k2*Local_Global(K2,N,p2o,p2i);
K3:=Stiffness_Matrices(X3);
KG3:=k3*Local_Global(K3,N,p3o,p3i);
K4:=Stiffness_Matrices(X4);
KG4:=k4*Local_Global(K4,N,p4o,p4i);
K5:=Stiffness_Matrices(X5);
KG5:=k5*Local_Global(K5,N,p5o,p5i);
KG:=KG1+KG2+KG3+KG4+KG5;
KGinitial:=KG;
//Implementing Boundary Condition
for i in 1:N loop
KG[2*b1-1,i]:=0;
KG[2*b1,i]:=0;
KG[2*b2-1,i]:=0;
KG[2*b2,i]:=0;
end for;
KG[2*b1-1,2*b1-1]:=1;
KG[2*b1,2*b1]:=1;
KG[2*b2-1,2*b2-1]:=1;
KG[2*b2,2*b2]:=1;
//Solving Displacement
Sol:=Gauss_Jordan(N,KG,X);
//Solving Reaction Force
SolMat:=matrix(Sol);
XMat:=matrix(X);
R:=Reaction_Trusses(N,KGinitial,SolMat,XMat);
end Tugas_Trusses;

Fungsi Degtorad
function Degtorad input Real deg; output Real rad; protected constant Real pi = 3.14; algorithm rad:=deg*pi/180; end Degtorad;
Fungsi Stiffness Matrices
function Stiffness_Matrices
input Real A;
output Real X[4,4];
protected
Real Y;
Real float_error = 10e-10;
final constant Real pi=2*Modelica.Math.asin(1.0);
algorithm
Y:=A/180*pi;
X:=[(Modelica.Math.cos(Y))^2,Modelica.Math.cos(Y)*Modelica.Math.sin(Y),-(Modelica.Math.cos(Y))^2,-
Modelica.Math.cos(Y)*Modelica.Math.sin(Y);
Modelica.Math.cos(Y)*Modelica.Math.sin(Y),(Modelica.Math.sin(Y))^2,-Modelica.Math.cos(Y)*Modelica.Math.sin(Y),-
(Modelica.Math.sin(Y))^2;
-(Modelica.Math.cos(Y))^2,-Modelica.Math.cos(Y)*Modelica.Math.sin(Y),
(Modelica.Math.cos(Y))^2,Modelica.Math.cos(Y)*Modelica.Math.sin(Y);
-Modelica.Math.cos(Y)*Modelica.Math.sin(Y),-(Modelica.Math.sin(Y))^2,Modelica.Math.cos(Y)*Modelica.Math.sin(Y),
(Modelica.Math.sin(Y))^2];
for i in 1:4 loop
for j in 1:4 loop
if abs(X[i,j]) <= float_error then
X[i,j] := 0;
end if;
end for;
end for;
end Stiffness_Matrices;
Fungsi Local Global
function Local_Global input Real Y[4,4]; input Integer B; input Integer p1; input Integer p2; output Real G[B,B]; algorithm for i in 1:B loop for j in 1:B loop G[i,j]:=0; end for; end for; G[2*p1,2*p1]:=Y[2,2]; G[2*p1-1,2*p1-1]:=Y[1,1]; G[2*p1,2*p1-1]:=Y[2,1]; G[2*p1-1,2*p1]:=Y[1,2]; G[2*p2,2*p2]:=Y[4,4]; G[2*p2-1,2*p2-1]:=Y[3,3]; G[2*p2,2*p2-1]:=Y[4,3]; G[2*p2-1,2*p2]:=Y[3,4]; G[2*p2,2*p1]:=Y[4,2]; G[2*p2-1,2*p1-1]:=Y[3,1]; G[2*p2,2*p1-1]:=Y[4,1]; G[2*p2-1,2*p1]:=Y[3,2]; G[2*p1,2*p2]:=Y[2,4]; G[2*p1-1,2*p2-1]:=Y[1,3]; G[2*p1,2*p2-1]:=Y[2,3]; G[2*p1-1,2*p2]:=Y[1,4]; end Local_Global;
Fungsi Reaction Trusses
function Reaction_Trusses input Integer N; input Real A[N,N]; input Real B[N,1]; input Real C[N,1]; output Real Sol[N]; protected Real X[N,1]; Real float_error = 10e-10; algorithm X:=A*B-C; for i in 1:N loop if abs(X[i,1]) <= float_error then X[i,1] := 0; end if; end for; for i in 1:N loop Sol[i]:=X[i,1]; end for; end Reaction_Trusses;
TUGAS GAUSS JORDAN
function Tugas_GaussJordan
input Real [:,:] A;
output Real [:,:] B;
protected // local variable
Integer h = 1; //pivot row
Integer k = 1; //pivot coloumn
Integer m = size(A,1); //Number of row
Integer n = size(A,2); //Number of column
Integer c = 0;
Integer max_row; // Row index of max number in pivot column
Real [:] pivot_column;
Real [:] pivot_row;
Real [:,:] temp_array;
Real r;
Real float_error = 10e-10;
algorithm
//function input A and output B
B := A;
while h <= m and k <= n loop
for i in 1 : m loop
for j in 1 : n loop
if abs(B[i,j]) <= float_error then
B[i,j] := 0;
end if;
end for;
end for;
//Finding pivot
pivot_column:= {B[i,h] for i in h:m};
//Search for the bottom row that has the highest pivot value
c:=h-1;
for element in pivot_column loop
c:= c+1;
if abs(element)== max(abs(pivot_column)) then
max_row :=c;
end if;
end for;
//If there are no pivots in this column, move to the next column
if B[max_row,k] == 0 then
k:=k+1;
else
// switch row h - max_row
temp_array := B;
temp_array[h] := B[max_row];
temp_array[max_row] := B[h];
B:= temp_array;
//devide pivot row by pivot number
B[h] := B[h]/B[h,k];
for i in (h+1) :m loop
r := B[i,k]/B[h,k];
B[i,k]:=0;
for j in (k+1) : n loop
B[i,j] := B[i,j]-B[h,j] * r;
end for;
end for;
//move to pivot column and the next row
h := h+1;
k := k+1;
end if;
end while;
// from the top right
h :=m;
k :=n;
while h >=1 and k>=1 loop
//dealing with error
for i in 1:m loop
for j in 1:n loop
if abs(B[i,j]) <=float_error then
B[i,j]:=0;
end if;
end for;
end for;
//finding pivot
pivot_row := {B[h,i] for i in 1:k};
//Get position index k of pivot
c := 0;
for element in pivot_row loop
c := c+1;
if element <> 0 then
break;
end if;
end for;
k:= c;
// no pivot in this row, move to next row
if B[h,k] == 0 then
h:= h-1;
else
//perform row operatation
for i in 1:(h-1) loop
r := B[i,k];
B[i] := B[i] - B[h] *r;
end for;
//move to next pivot row dan column
h:=h+1;
k:=k+1;
end if;
end while;
end Tugas_GaussJordan;
Pertemuan 4 (02/12/20)
Membuat diagram class dan flowchart
QUIZ 1 Berikut jawaban beserta Flowchart dari QUIZ 1 saya.


TUGAS PERTEMUAN 4






